FUKUI Rui
(Associate Professor/Division of Environmental Studies)
Department of Human and Engineered Environmental Studies/Robotics (Distributed/Integrated robotic system)

Career Summary
- 2002: Graduated from Department of Mechano-Informatics, The University of Tokyo.
- 2004: Received Master's degree from Graduate School of Information Science and Technology, The University of Tokyo.
- 2004--2006: Mitsubishi Heavy Industries, LTD.
- 2009: Received Ph.D. from Graduate School of Information Science and Technology, the University of Tokyo.
- 2009: (Project) Assistant Professor, Graduate School of Information Science and Technology, the University of Tokyo.
- 2013: Project Assistant Professor, School of Engineering, the University of Tokyo.
- 2016: Associate Professor, Graduate School of Frontier Sciences, the University of Tokyo.
Educational Activities
- Graduate School: Human and Engineered Environmental Studies (Basic IIA, IIB and Advanced), Special Lecture on Human Factors
- School of Engineering: System Control 1, Mechanical Engineering Exercise 1, Mechanical Engineering Exercise 2, Creative Design Exercise
Research Activities
♦ Wearable wrist contour measurement device for hand gesture recognition
To realize a future sophisticated interface, we are developing a watch-type wearable device. This device measures the wrist contour using arrays of photo-reflectors and converts the wrist contour data to the label of hand gestures using machine learning techniques.
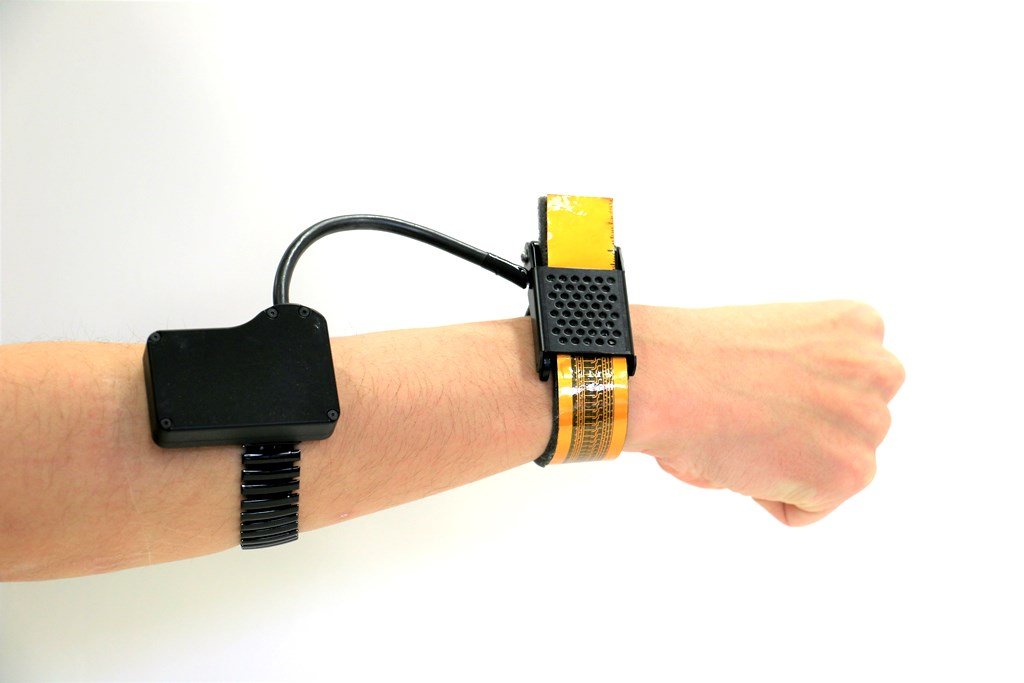
Wearable wrist contour measurement device for hand gesture recognition.
♦ Automatic construction system of modularized rail structure
The objective of this system is decommissioning operation at the Fukushima Daiichi Nuclear Power Plant (TEPCO), where humans cannot enter or work inside. This system constructs a rail structure platform that enables other robots to move easily in three dimensional space.
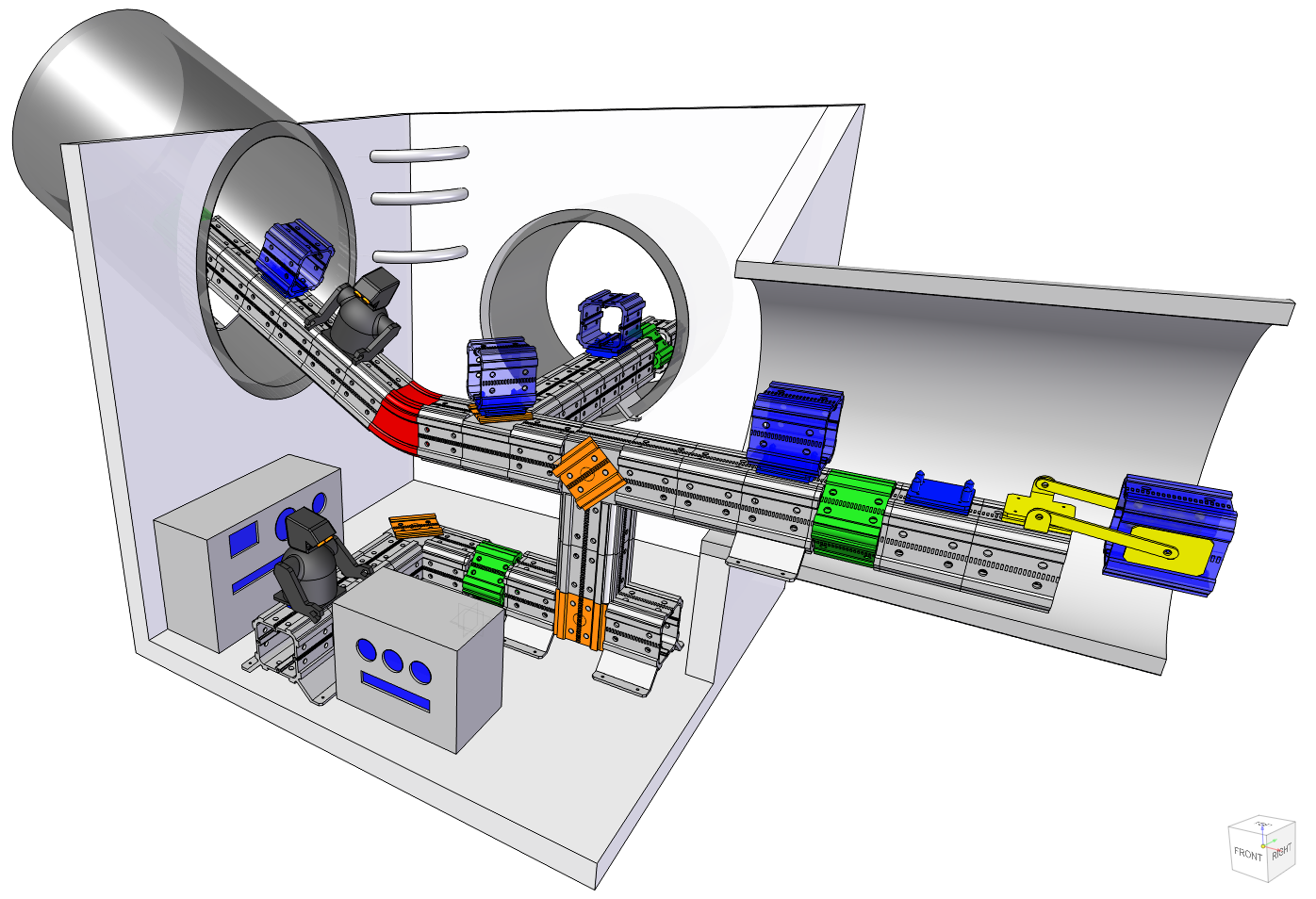
Conceptual image of the automatic construction system of modularized rail structure.
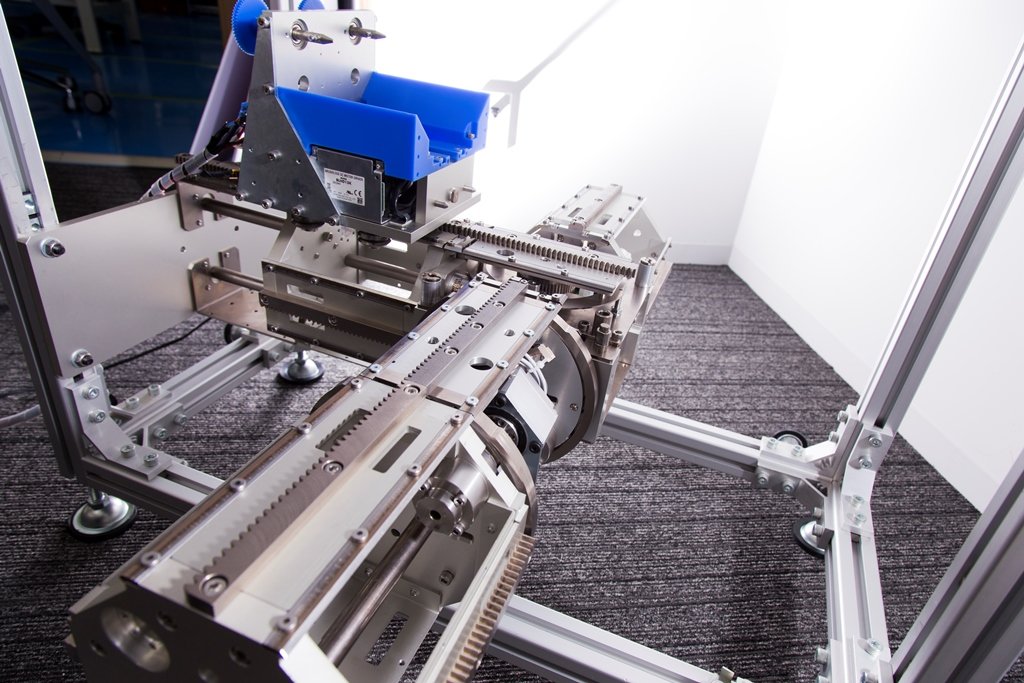
A prototype of the automatic construction system of modularized rail structure.
♦ A Tablet Interface for a Direct Vision Teleoperation of an Excavator
This study examines a new control system for an excavator using a tablet device. To realize an intuitive interface, we propose novel graphical user interfaces (GUIs). The experimental result concludes that proposed two GUIs superior to the conventional interface in task execution time, accuracy, and subjective usability evaluation.

Snapshot of an excavator operation using the proposed GUI.
♦ High-speed and Large-payload Ceiling Mobile Robot UsingCrawler (HanGrawler)
HanGrawler is a ceiling-mounted mobile robot with high-speed mobility and the ability to freely select and adjust its route under a ceiling plate. HanGrawler hangs from the holes of a perforated metal ceiling plate using newly developed mechanically constrained hanging mechanisms mounted on crawler-type traveling equipment. HanGrawler can travel linearly at 1.0 m/s, turn at an 8.5◦/s rotational speed, and carry a maximum load of 60 kg.
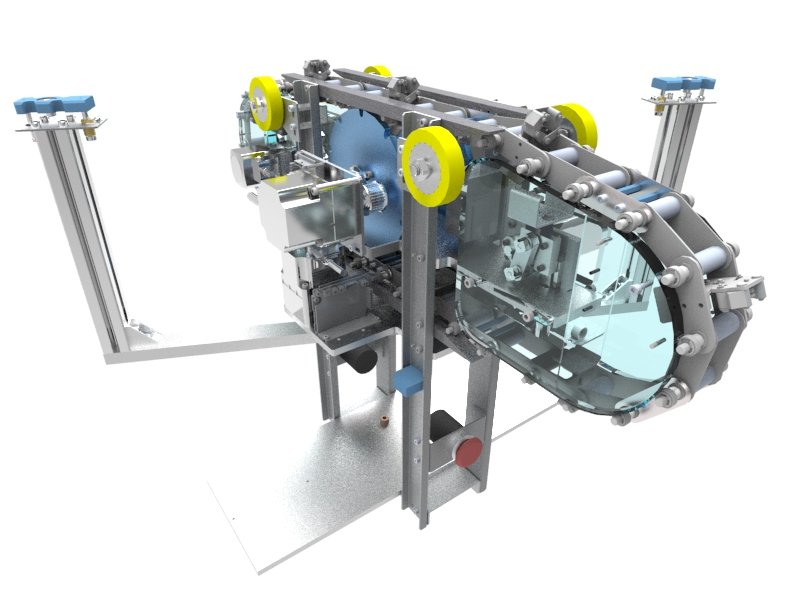
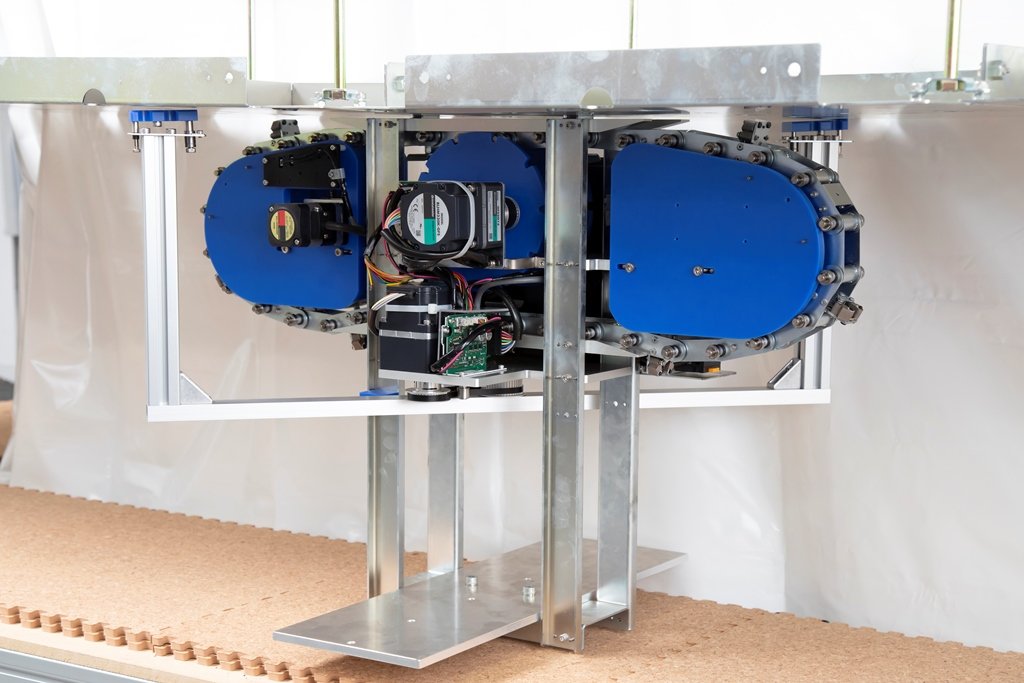
3D-CAD model and snapshot of High-speed and Large-payload Ceiling Mobile Robot Using Crawler (HanGrawler).
Literature
- Rui Fukui, Masahiko Watanabe, Masamichi Shimosaka, and Tomomasa Sato. Hand shape classification with a wrist contour sensor. analyses of feature types, resemblance between subjects, and data variation with pronation angle. The International Journal of Robotics Research, Vol. 33, No. 4, pp. 658.671, 2014. [Download this paper]
- Rui Fukui, Yuta Kato, Ryo Takahashi, Weiwei Wan, and Masayuki Nakao. Automated construction system of robot locomotion and operation platform for hazardous environments - basic system design and feasibility study of module transferring and connecting motions -. Journal of Field Robotics, 2016. [Download this paper]
- Shunsuke Okishiba, Rui Fukui, Mitsuru Takagi, Hitoshi Azumi, Shin’ichi Warisawa, Ryoichi Togashi, and Takeshi Ooi Hiroyuki Kitaoka. Tablet interface for direct vision teleoperation of an excavator for urban construction work. Automation in Construction, Vol. 102, pp. 17–26, 2019. [Download this paper]
- Rui Fukui, Yudai Yamada, Keisuke Mitsudome, Katsuya Sano, and Shin’ichi Warisawa. Hangrawler: Large-payload and high-speed ceiling mobile robot using crawler. IEEE Transactions on Robotics (TRO), Vol. 36, pp. 1053–1066, 2020. [Download this paper]
Other Activities
Institute of Electrical and Electronics Engineers (IEEE), Robotics and Automation Society
Japan Society of Mechanical Engineers
Robotics Society of Japan
Society of Instrument and Control Engineers
Japan Society for Technology of Plasticity
Future Plan
The discovery and establishment of basic and general knowledge and technologies are important tasks.
My intention is to deploy such knowledge and technologies in real industrial and service applications, so, I welcome collaboration with various private companies and research institutions.
Messages to Students
I think the integration of creative design and computer science is quite important for conducting novel research. I am always pursuing ways of designing beautiful yet functional shapes and software.
I want to share the pleasure of designing and developing novel things (robots, devices, software, and so on) with many students.