YAMAMOTO Akio
(Professor/Division of Environmental Studies)
Department of Human and Engineered Environmental Studies/Mechatronics, Actuator, Computer-Human Interaction

Career Summary
1994: Graduated from Faculty of Engineering (University of Tokyo) 1999: Received Ph.D. from University of Tokyo 1999: Research associate (University of Tokyo) 2000: Lecturer (University of Tokyo) 2005: Associate Professor (University of Tokyo) 2017: Professor (Graduate School of Engineering, University of Tokyo) 2020: Professor (Graduate School of Frontier Sciences, University of Tokyo)
Educational Activities
Graduate school: Mechatronics
Department of Precision Engineering: Signal Processing, Hands-on Exercise on Precision Engineering
Research Activities
Electrostatic Actuation:
We have been working on a wide range of electrostatic actuation technologies in the macroscopic scale. Electrostatic acutation can realize unique systems having special features, such as thin, light-weight, and transparent. Fully utilizing such unique characteristics, we have been developing innovative mechatronic systems.
- Electrostatic active display, to realize physical actuations on a visual display.
- Electrostatic visuo-haptic system, on which users can feel force feedback from visual information.
- Electrostatic paper handling.
- Electrostatic wall climbing robot.
- High-power electrostatic artificial muscle for robotic applications.
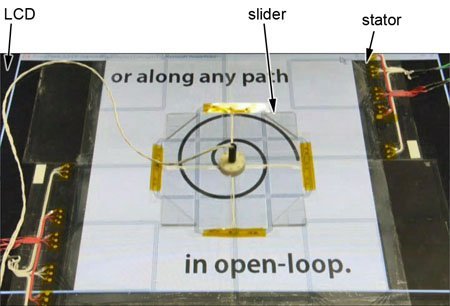
Transparent electrostatic actuator realizes physical motions on a display
Haptic/tactile technologies:
We have been studying novel haptic/tactile technologies to enhance reality in tele-operations and virtual reality.
- Tactile displays to reproduce surface texture feelings, which include surface roughness, themal feeling, and softness feeling.
- Pseudo-haptic technologies using tactile stimulations.
- Human operation support using haptics.

Pseudo-haptic feedback utilizing palm pressurization
Literature
1) T. Hosobata, A. Yamamoto, and T. Higuchi: Transparent Synchronous Electrostatic Actuator for Long-stroke Planar Motion, IEEE Transactions on Mechatronics, Vol. 20, Issue 4, pp. 1765-1776 (2015).
2) T. Nakamura and A. Yamamoto: A Multi-user Surface Visuo-Haptic Display Using Electrostatic Friction Modulation and Capacitive-type Position Sensing, IEEE Transactions on Haptics, Vol. 9, Issue 3, pp. 311-322 (2016).
3) A. Yamamoto, S. Nagasawa, H. Yamamoto, and T. Higuchi: Electrostatic Tactile Display with Thin Film Slider and Its Application to Tactile Tele-Presentation Systems, IEEE Transactions on Visualization & Computer Graphics, Vol. 12, No. 2, pp. 168-177 (2006).
4) E. van West, A. Yamamoto, and T. Higuchi: Development of 2-DOF Tilting Actuator with Remote Center of Rotation for Human Operated Non-Contact Handling Tool, Mechatronics, Vol. 21, Issue 7, pp. 1222-1233 (2011).
Other Activities
nstitute of Electrical and Electronics Engineers (IEEE)
Robotics Society of Japan (RSJ)
Japan Society of Mechanical Engineers (JSME)
Institute of Electrical Engineers of Japan (IEEJ)
Japan Society for Precision Engineering (JSPE)
Society of Instrument and Control Engineers (SICE)
Virtual Reality Society of Japan (VRSJ)
Future Plan
Our laboratory aims at creating ambient mechatronic environments that naturally surround human to realize novel human-environment interactions.
Messages to Students
Let's dive in Frontier to explore new concepts and new technologies together!