海中ロボットによる海氷裏面の全自動計測に成功 ~ 南極海での調査に向けて大きな一歩 ~
- ニュース
- 記者発表
東京大学
国立極地研研究所
発表のポイント
◆海氷や棚氷の下に入り込み、全自動で航行しながら氷の裏面の形状を高精度に計測するAUV(自律型海中ロボット:Autonomous Underwater Vehicle)「MONACA」(モナカ)を開発しました。
◆北海道紋別港で、MONACAは全27回、のべ8時間17分、8.9 kmに渡って海氷下を全自動潜航し、のべ47,143�F(東京ドームとほぼ同じ面積)の海氷裏面の形状データを得ました。完全無索での潜航にも成功し、南極海での完全結氷域探査の技術的目途が立ちました。
◆ 今後は更なる性能向上を図り、来年度以降に予定されている南極海への展開に備えます。南極での計測を通し、地球システムにおける南極の役割の解明を目指します。
発表概要
東京大学 生産技術研究所 附属海中観測実装工学研究センターの巻 俊宏 准教授(新領域創成科学研究科の協力講座を担当)および同研究室に所属する山縣 広和 特任研究員と小知井 秀馬 修士課程学生、そして国立極地研究所 地圏研究グループの野木 義史 教授らの研究グループは、文部科学省 科学研究費助成事業 新学術領域研究 『熱-水-物質の巨大リザーバ 全球環境変動を駆動する南大洋・南極氷床(未探査領域への挑戦)』(JSPS KAKENHI JP17H06322)のもと、南極の海氷や棚氷域を探査する新しいAUV(自律型海中ロボット、注1)「MONACA」を開発し、北海道紋別港で、日本で初めて、海氷に対して相対的に測位しながらの面的な形状計測に成功しました。
南極は地球全体の環境変動の大要因と考えられており、船舶や航空機、人工衛星などのプラットフォームにより観測されてきましたが、船の入れない棚氷や海氷の下側はほとんど観測できていませんでした。ケーブル不要かつ全自動で運用できるAUVは新たな水中探査プラットフォームとして注目されていますが、投入や回収のために母船が接近できない、AUVが浮上できる場所が限られるなどの課題から、氷海域における展開事例は限られていました。
そこで、本研究チームはMONACAが氷の奥深くへ潜入して形状計測を行い、その後投入地点まで安全に帰って来られるよう、マルチビームソーナー(注2)とDVL(注3)、INS(注4)を備えたセンサユニット、およびこれらのセンサによる氷に対する相対ナビゲーションアルゴリズムを実装しました。このセンサユニットは氷を計測する際は上向きとしますが、上下反転を可能とすることで、氷の下の海底の計測にも対応します。また、複雑な氷の形状に沿って航行できるよう、スキャニングソーナーによる障害物回避手法やホバリング(その場停止)のできる高い運動能力を備えました。
この結果、令和3年2月に北海道紋別港で行われた実験において、MONACAは全27回、のべ8時間17分、8.9 kmに及ぶ海氷下での全自動潜航に成功しました。一連の潜航により、のべ47,143�F(東京ドームとほぼ同じ面積)の海氷裏面および5,875�Fの海底面の形状データが得られました。また、そのうち1回(10分間、走行距離80 m)は安全索をつけない完全無索での潜航でした。
今後はさらなる性能向上を図り、来年度以降に予定されている南極海への展開に備えます。そして、南極の海氷や棚氷の計測を通して、地球システムにおける南極の役割の解明を目指します。
発表内容
<研究の背景>
南極は地球における熱、水、物質の巨大リザーバであり、地球全体の環境変動の大要因と考えられています。このため、そのメカニズムの解明に向けて、船舶や航空機、人工衛星などの各種プラットフォームにより南極の氷や地形、海水、気象などさまざまな観測がなされてきました。しかしながら南極大陸をとりまく棚氷や海氷の下部については、船舶が入れないことから、ほとんど観測できていません。
海中ロボットは海中探査に広く使われており、中でもAUVはケーブル不要で全自動で運用できることから、広域を効率的に観測できるプラットフォームとして注目されています。しかしながら氷海域については、母船が接近できない、浮上できるのが氷の無い場所に限られる等の課題があるため、展開事例は限られていました。
<研究の内容>
本研究チームは、文部科学省 科学研究費助成事業 新学術領域研究 『熱―水―物質の巨大リザーバ 全球環境変動を駆動する南大洋・南極氷床(未探査領域への挑戦)』( JSPS KAKENHI JP17H06322 )のもとで南極の氷海域探査用のAUV MONACAの開発を進めてきました(参考文献1、2、3)(図1、図2)。ちなみにMONACAはMobility Oriented Nadir AntarctiC Adventurerの略です。MONACAは全長2.1m、空中重量235 kg、最大潜航深度1,500 mであり、動作時間は8時間、氷の裏側へ最大10 km潜入できるように設計されています。氷の奥深くへ潜入して形状計測を行い、その後投入地点まで安全に帰って来られるよう、マルチビームソーナー(注2)とDVL(注3)、INS(注4)を備えたセンサユニット、およびこれらのセンサによる氷に対する相対ナビゲーションアルゴリズムを備えています。このセンサユニットは氷を計測する際は上向きとしますが、上下反転可能とすることで、氷の下の海底の計測にも対応します。また、複雑な氷の形状に沿って航行できるよう、スキャニングソーナーによる障害物回避手法やホバリング(その場停止)のできる高い運動能力を備えています。この他、水質を計測するためのCTD(注5)センサを備えています。
令和3年2月に北海道紋別港でMONACAの潜航実験を行いました。実験フィールドを図3に、MONACAの写真を図4、図5示します。完全に結氷していたため、岸壁最奥部(図3でクレーンがある場所)の氷を砕いて、MONACAをぎりぎり投入できる大きさの開口部を設けました。気温は時としてマイナス5℃を下回る過酷な環境でしたが、MONACAは全27回、のべ8時間17分、8.9 kmに及ぶ海氷下での全自動潜航に成功しました。一連の潜航により、のべ47,143�Fの海氷裏面および5,875 �Fの海底面の形状データが得られました。これまでに報告されている事例は、氷の無い海域(オープンウォーター)にてAUVを展開し、氷の下へ真っすぐ潜入させたのち、Uターンして戻ってこさせる方式でした。今回はAUVの展開、回収ともに図6、図7のように狭い開口部から行い、またAUV自身が氷に対して相対的に測位しながら芝刈り機のように繰り返し往復することにより、図8、図9のように面的に広い範囲を計測し、自律的に開口部へ帰還することに成功しました。これは発表者らの知る限り日本初であり、完全結氷域の探査の実現に大きく貢献します。また、そのうち1回(10分間、走行距離80 m)では安全索をつけない完全無索での潜航に成功しました。海中での無線通信は困難であるため、完全無索で運用するためには、外部支援に一切頼らずに開口部へ戻ってこられる高い自律性と安定性、高精度なナビゲーション能力が必要です。MONACAにはそれらが備わっていることが改めて証明されたことになります。
<今後の展開>
本実験により、氷海域探査用AUV MONACAによる南極海の完全結氷域の探査の技術的目途が立ちました。本実験で得られた各種センサデータをもとに、氷に対する相対ナビゲーションアルゴリズムのさらなる性能向上を図り、来年度以降に予定されている南極海への展開に備えます(南極観測船「しらせ」による昭和基地周辺の調査が予定されています)。そして、南極の海氷や棚氷の計測を通して、地球システムにおける南極の役割の解明を目指します。
参考文献
[1] 巻 俊宏、吉田 弘、自律型無人探査機(AUV)による未探査領域調査、低温科学、76、259-267 (2018.3)
[2] 山縣広和, 巻俊宏, 吉田弘, 野木義史, 南極海探査を目的としたAUV "MONACA"の設計と運用計画, ロボティクス・メカトロニクス講演会' 19, 2A1-H07, 広島, (2019.6)
[3] GRAntartcic ウェブサイト:http://grantarctic.jp/pages/intro.html
発表者
巻 俊宏 (東京大学 生産技術研究所 准教授)
山縣 広和 (東京大学 生産技術研究所 特任研究員)
小知井 秀馬 (東京大学 大学院新領域創成科学研究科 海洋技術環境学専攻 修士課程1年)
野木 義史 (国立極地研究所 地圏研究グループ 教授)
用語解説
(注1)AUV:
Autonomous Underwater Vehicle(自律型海中ロボット)。無索・全自動で行動する海中探査ロボット。母船から離れ、広い海域を効率的に調査することができる。海中では無線通信手段が限られるため、人間の指示を受けずに行動する高い自律性が求められる。
(注2)マルチビームソーナー:
複数の超音波ビームにより物体の形状を計測するセンサ。海底地形の計測に広く用いられる。マルチビームソナーとも呼ばれる。
(注3)DVL:
Doppler Velocity Log(ドップラー式対地速度計)。海底に超音波ビームを照射し、その反射波の周波数から海底に対する相対速度を求めるセンサ。
(注4)INS:
Inertial Navigation System(慣性航法装置)。高性能な加速度・角速度センサによって自身にかかる力を計測し、自己位置や姿勢を推定する装置。
(注5)CTD:
Conductivity(電気伝導度)、Temperature(温度)、Depth(深度)という海水の基本パラメータを計測するセンサ。これらの情報から塩分濃度や水中音速を推定できる。
添付資料
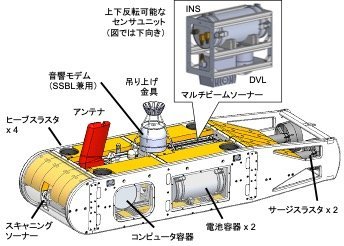
図1 AUV MONACAの機器配置
左が前方。スラスタ(推進機)はヒーブ(上下)およびロール・ピッチ(縦揺れ、横揺れ)方向の制御用に4台、サージ(前後)およびヨー(方位)の制御用に2台搭載している。動体中央部に、上下反転可能なセンサユニットを搭載している。エネルギー源はリチウムイオン電池であり、動体中央左右に各1セット搭載している。メインコンピュータおよび各種インタフェース、電源回路等は前方の圧力容器に収納されている。
図2 AUV MONACAのイメージイラスト
氷の下を冒険するイメージ。右上は科研費プロジェクトのロゴマーク。

図3 北海道紋別港フィールド全景
完全に氷で覆われている。水深約10m、広さはサッカー場程度。MONACAの投入地点を図中に示す。
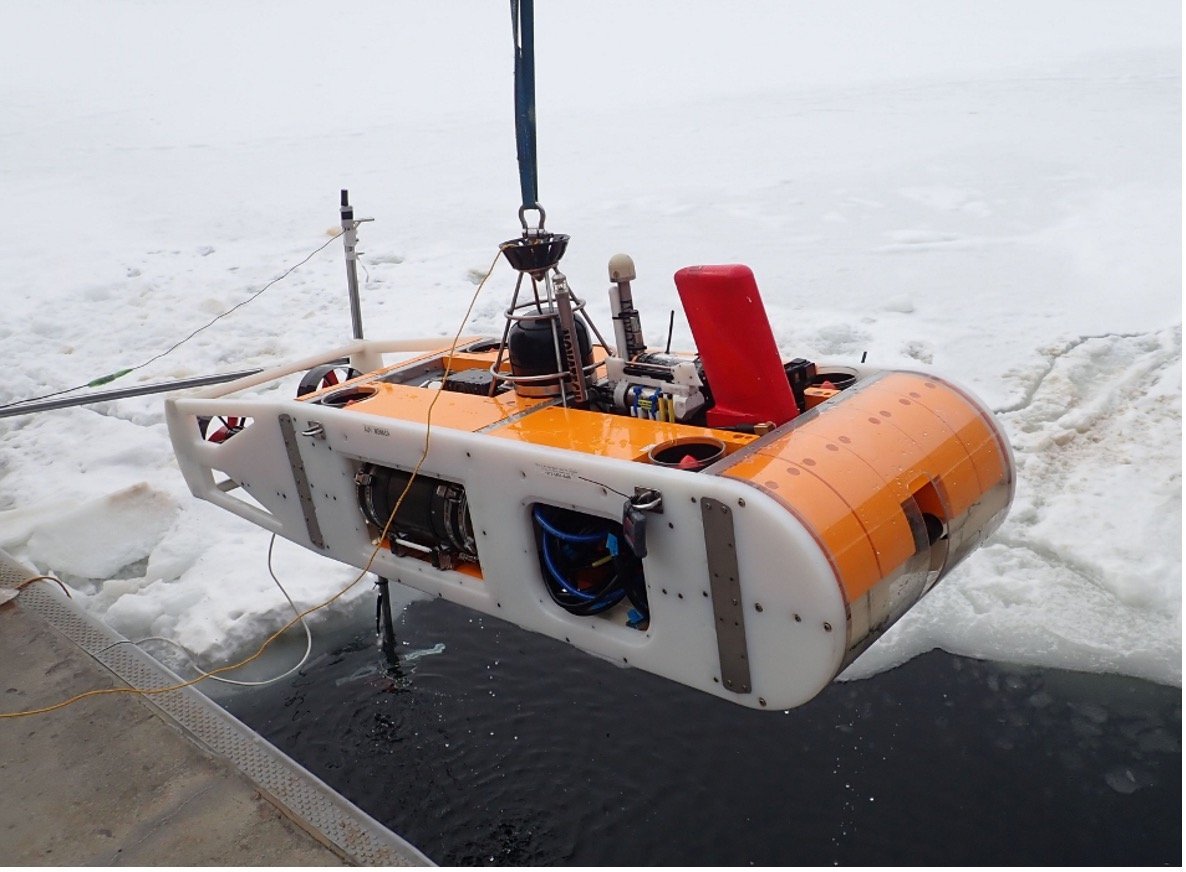
図4 AUV MONACA
観測を終え、クレーンで吊り上げたところ。背後に写っているフレームは音響モデム(水中のMONACAと超音波で通信および位置計測するための機器)設置用のもの。
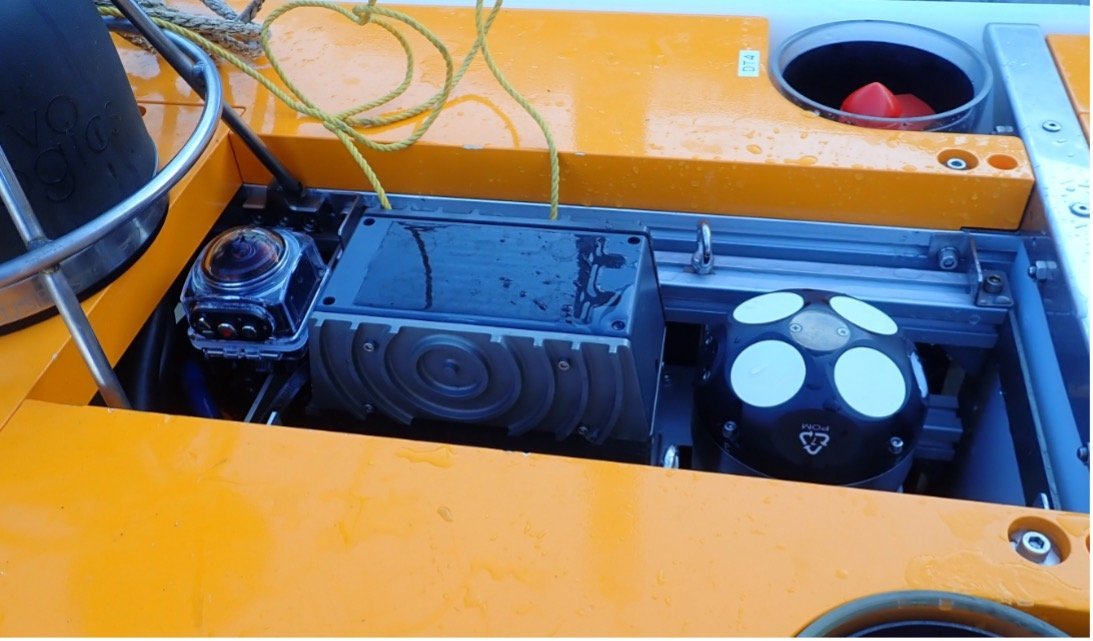
図5 AUV MONACAのセンサユニット
氷の計測用に上向きに取り付けた状態。中央の箱状の装置がマルチビームソーナー。その右がDVL。

図6 実験の様子1
潜航開始直後の様子。MONACAはその場で所定の深度まで潜り、その後氷の裏側への潜入を開始する。MONACAの上部、水面近くに見えているのは音響モデム。

図7 実験の様子2
完全無索での潜航を終え、投入地点に戻ってきたMONACA。
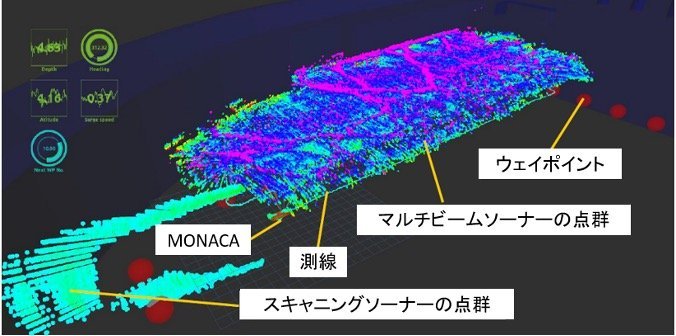
図8 観測中の様子
センサデータを可視化したもの。スキャニングソーナーにより前方を監視しながら氷に沿ってウェイポイントを順番に辿りつつ、上向きのマルチビームソーナーにより氷裏面の形状を計測する。氷の形状は深度によって色分けされており、氷の割れ目が確認できる。
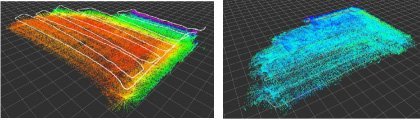
図9 取得した形状データの例
左:海底面 右:氷裏面 いずれもグリッド幅は5m。MONACAの航跡を白線で示す。
動画リスト
https://youtube.com/playlist?list=PL8-83-iHUrFlKlEh9vmRrjF9fOVDLVImE
関連ページ
お問い合わせ