福井 類
(ふくい るい/准教授/環境学研究系)
人間環境学専攻/人間支援環境学講座/ロボット工学(分散・統合型ロボットシステム)

略歴
- 2002年3月 東京大学工学部機械情報工学科卒業
- 2004年3月 東京大学大学院情報理工学系研究科知能機械情報学専攻修士課程修了
- 2004年4月~2006年3月 三菱重工業株式会社勤務
- 2009年3月 東京大学大学院情報理工学系研究科知能機械情報学専攻博士課程修了(博士(工学))
- 2009年4月~2013年3月 東京大学大学院情報理工学系研究科知能機械情報学専攻(特任)助教
- 2013年4月~2016年3月 東京大学大学院工学系研究科機械工学専攻特任講師
- 2016年4月より現職
教育活動
- 大学院:人間環境学(基礎IIA, IIB, 発展), 人間工学特論
- 工学部機械工学科:システム制御1, 機械工学演習2, 創造設計演習
研究活動
◆手首凹凸計測により手指動作を推定するデバイス:
近未来の装着型ユーザインタフェースの実現を目標に,腕時計型デバイスに内臓されたフォトリフレクタアレイによって手首表面の凹凸を計測し,手先の形状を推定する研究を進めています.
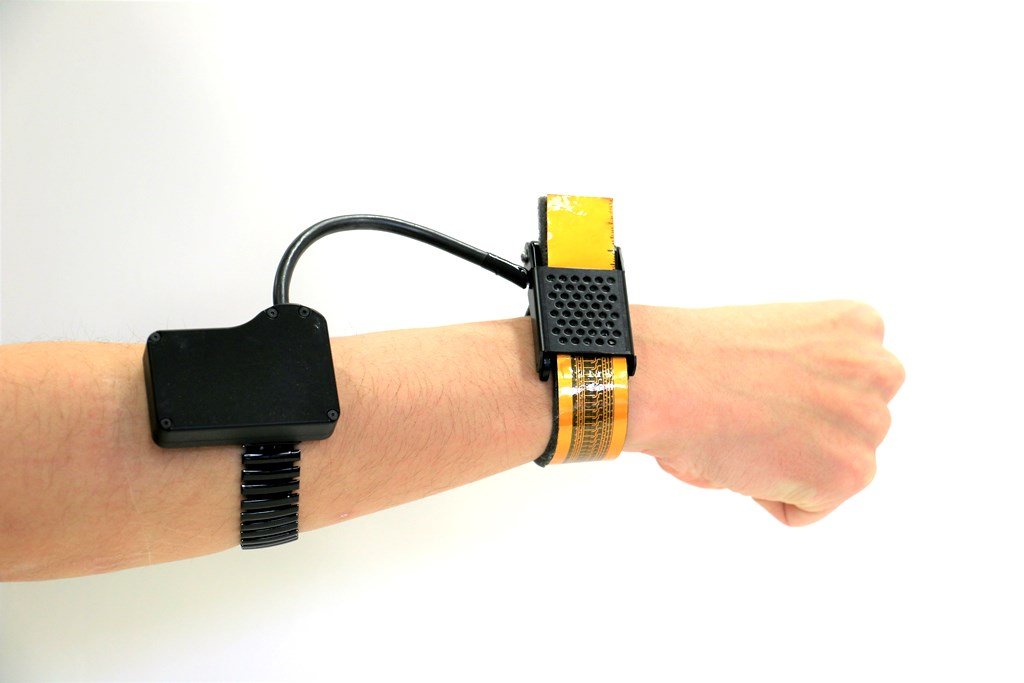
手首凹凸のみから手先形状を推定するウェアラブルデバイス
◆人が立ち入るのが困難な環境で作業をするロボット:
福島第一原子力発電所のような人が立ち入れない環境でロボットが活躍するために,ロボットが3次元的に自由に移動可能な足場(軌道構造体)を,ロボット自身が自動施工するシステムの開発をしています.
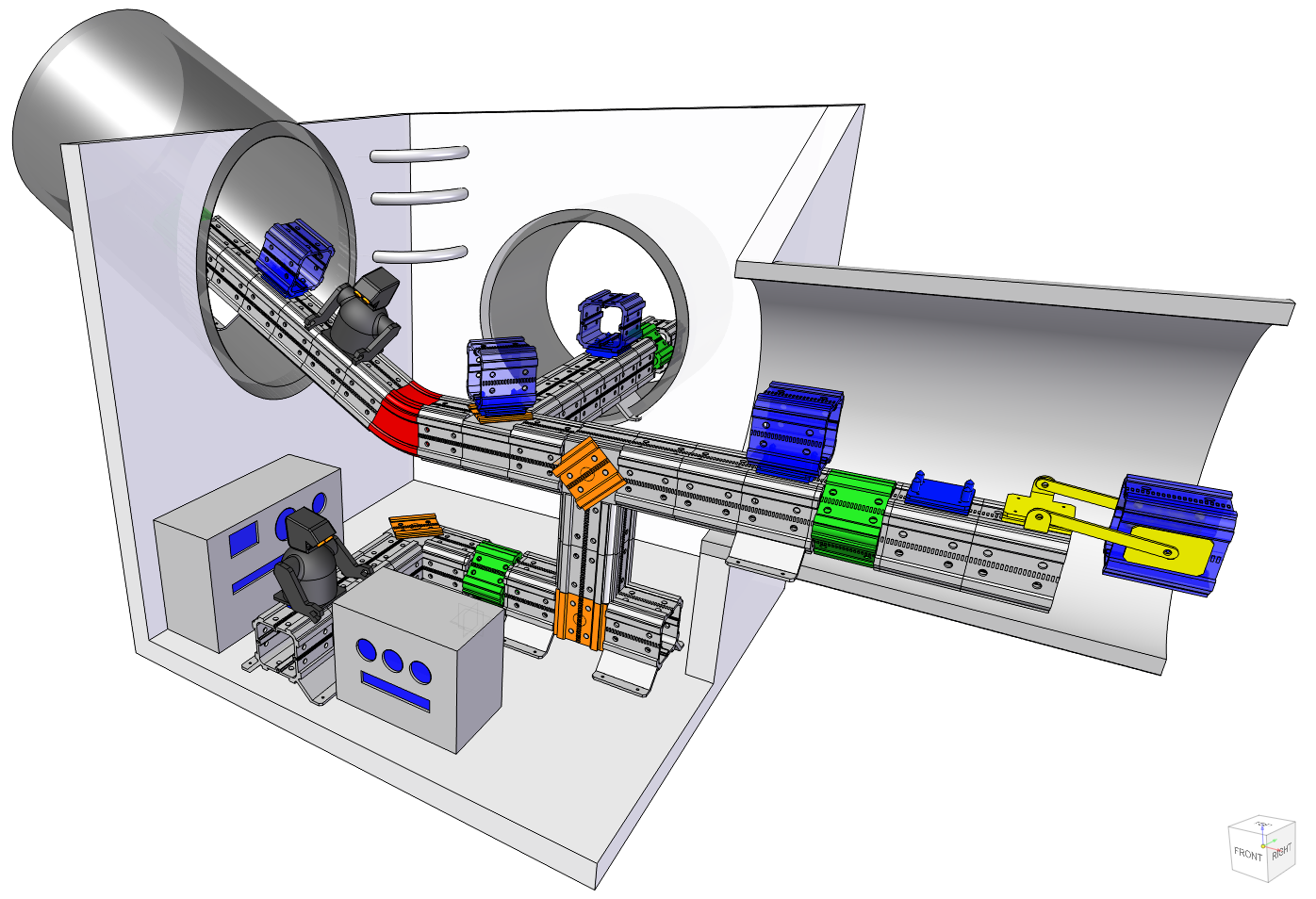
軌道構造体自動施工ロボットシステムのコンセプト図

軌道構造体自動施工ロボットシステムのプロトタイプ
◆タブレット端末を用いた油圧ショベルの操作インタフェース:
都市土木作業用のパワーショベルを,タブレット端末を用いて操作するためのグラフィカルユーザインタフェース(GUI)の研究です.実機を用いたユーザビリティ実験を行った結果,新たに提案したGUIが, 従来型インタフェースを模したGUIよりも優れた操作性を示すことが明らかとなっています.

タブレット端末を用いてパワーショベルを操作する様子
◆無限軌道式高機動天井移動ロボット (HanGrawler):
天井面を様々な物品の運搬経路として活用すべく, 大きな荷重を支持しながら天井面を移動するロボットを開発しています. このロボットでは天井面にパンチングメタルを用い,その天井面を掴む機構を無限軌道上に設けることで1.0m/sという高速移動を実現してます.
★本研究に関する特許(移動装置,特願2017-020433)を,ご活用頂けるパートナーを募集しています.
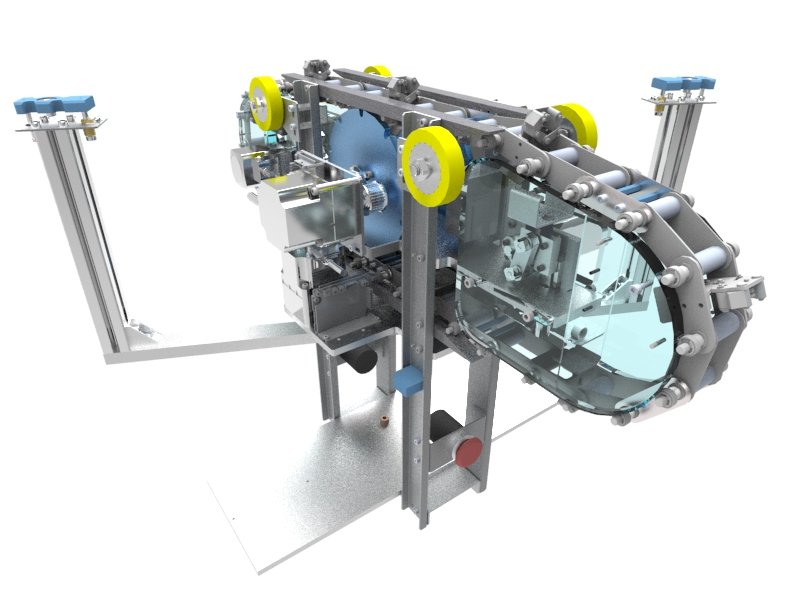
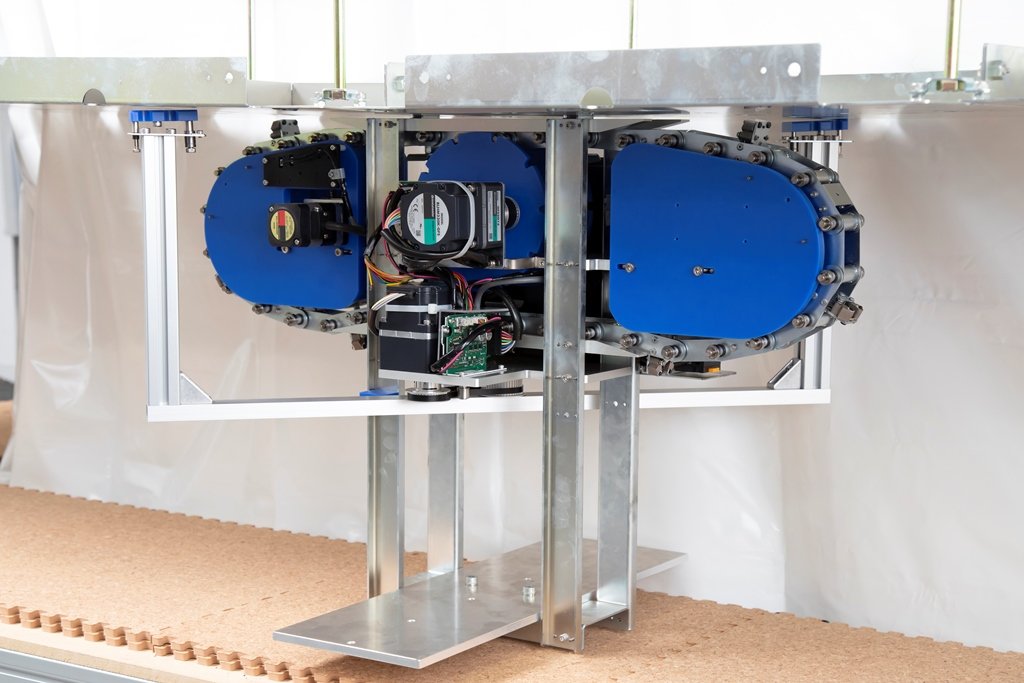
無限軌道式高機動天井移動ロボット (HanGrawler)のCAD図および写真
文献
- Rui Fukui, Masahiko Watanabe, Masamichi Shimosaka, and Tomomasa Sato. Hand shape classification with a wrist contour sensor. analyses of feature types, resemblance between subjects, and data variation with pronation angle. The International Journal of Robotics Research, Vol. 33, No. 4, pp. 658.671, 2014. [Download this paper]
- Rui Fukui, Yuta Kato, Ryo Takahashi, Weiwei Wan, and Masayuki Nakao. Automated construction system of robot locomotion and operation platform for hazardous environments - basic system design and feasibility study of module transferring and connecting motions -. Journal of Field Robotics, 2016. [Download this paper]
- Shunsuke Okishiba, Rui Fukui, Mitsuru Takagi, Hitoshi Azumi, Shin’ichi Warisawa, Ryoichi Togashi, and Takeshi Ooi Hiroyuki Kitaoka. Tablet interface for direct vision teleoperation of an excavator for urban construction work. Automation in Construction, Vol. 102, pp. 17–26, 2019. [Download this paper]
- Rui Fukui, Yudai Yamada, Keisuke Mitsudome, Katsuya Sano, and Shin’ichi Warisawa. Hangrawler: Large-payload and high-speed ceiling mobile robot using crawler. IEEE Transactions on Robotics (TRO), Vol. 36, pp. 1053–1066, 2020. [Download this paper]
その他
IEEE Robotics and Automation Society, 日本機械学会, 日本ロボット学会, 計測自動制御学会, 日本塑性加工学会等に所属
将来計画
基礎的・普遍的な知識の発見・技術の創成はもちろんのこと,最先端の知識・技術を新たな産業やサービスに応用する研究にも積極的に取り組んでいます.
そのために様々な民間企業・研究機関との共同研究に率先的に取り組んでおりますので,興味を持たれた方はお気軽にお声がけ下さい.
教員からのメッセージ
カタチにこだわったモノづくりとコンピュータ科学の融合を研究の強みとしています.
世の中にないモノを創り上げ,情報技術を駆使して制御し,データを分析する喜びを学生と共有したいと思っています.