山本 晃生
(やまもと あきお/教授/環境学研究系)
人間環境学専攻/人間支援環境学講座/メカトロニクス,アクチュエータ,インタラクション

略歴
1994年3月東京大学 工学部 精密機械工学科 卒業
1999年3月東京大学 大学院工学系研究科 精密機械工学専攻 博士課程修了・博士(工学)
1999年4月東京大学 工学系研究科 助手
2000年4月東京大学 工学系研究科 講師
2005年4月東京大学 工学系研究科 助教授/准教授
2017年4月東京大学 工学系研究科 教授
2020年4月より現職
教育活動
大学院:メカトロニクス論(工学系研究科)
工学部精密工学科:信号処理工学,精密工学実践演習
研究活動
静電アクチュエーション技術:
静電気力を活用したアクチュエーション技術の研究を進めています.静電気力を効果的に用いると,薄くて透明なアクチュエータや,軽量高出力なアクチュエータが実現できます.そうしたユニークなアクチュエータを活用した新しいメカトロニクスシステムを提案しています.
・映像と実物体動作を融合したアクティブディスプレイ(文献1)
・映像ディスプレイ上で力のフィードバックを与える静電ハプティックディスプレイ(文献2)
・紙の静電ハンドリングと立体造形
・静電気力で壁面に貼り付いて登る静電壁面移動システム
・ロボット応用をめざした静電人工筋
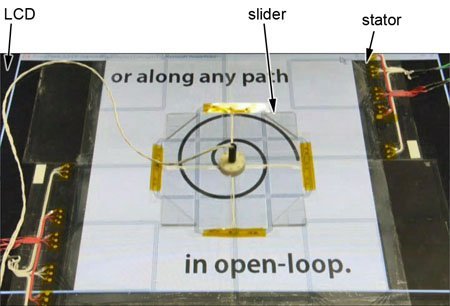
ディスプレイ上での実物体動作を実現する透明静電アクチュエータ
力触覚インタラクション技術(ハプティック技術):
遠隔操作やバーチャルリアリティにおいて,よりリアルな操作感を実現するため,ユーザに遠隔地や仮想世界の手触りを提示する力触覚提示技術の研究を進めています.
・指先に表面テクスチャ感,温度感,硬軟感などを再現提示する触感提示技術(文献3)
・触覚刺激を用いて「力」を擬似的に提示する疑似力覚提示技術
・力触覚提示を活用して実世界での作業を支援する作業支援ツール(文献4)

皮膚への圧力刺激により操作反力を擬似的に提示するコントローラ
文献
1) T. Hosobata, A. Yamamoto, and T. Higuchi: Transparent Synchronous Electrostatic Actuator for Long-stroke Planar Motion, IEEE Transactions on Mechatronics, Vol. 20, Issue 4, pp. 1765-1776 (2015).
2) T. Nakamura and A. Yamamoto: A Multi-user Surface Visuo-Haptic Display Using Electrostatic Friction Modulation and Capacitive-type Position Sensing, IEEE Transactions on Haptics, Vol. 9, Issue 3, pp. 311-322 (2016).
3) A. Yamamoto, S. Nagasawa, H. Yamamoto, and T. Higuchi: Electrostatic Tactile Display with Thin Film Slider and Its Application to Tactile Tele-Presentation Systems, IEEE Transactions on Visualization & Computer Graphics, Vol. 12, No. 2, pp. 168-177 (2006).
4) E. van West, A. Yamamoto, and T. Higuchi: Development of 2-DOF Tilting Actuator with Remote Center of Rotation for Human Operated Non-Contact Handling Tool, Mechatronics, Vol. 21, Issue 7, pp. 1222-1233 (2011).
その他
日本機械学会,日本ロボット学会,精密工学会,電気学会,計測自動制御学会,日本バーチャルリアリティ学会,IEEE各会員.
日本ロボット学会理事(2018~2020),日本ロボット学会誌編集委員長(2019~2020),日本機械学会機素潤滑設計部門運営委員(2019~現在),日本機械学会アクチュエータシステム技術企画委員会委員長(2014),計測自動制御学会SI部門触覚部会主査(2020),IEEE Robotics & Automation Society Japan Chapter Treasurer(2008~2009)等
将来計画
人や環境との親和性に優れたアクチュエータ・センサ技術を活用することにより,人と周辺環境のより良いインタラクションを創造することをめざします.
教員からのメッセージ
大学院の数年間は研究に没頭できる貴重な時間です.ともに学び,新しい技術を探求していきましょう.