For a Better Interaction Between Humans and Robots
Frontier Sciences: Akio Yamamoto

We are surrounded by machinery systems, including robots. I research mechatronics technology, which is the basis of these systems, for safe and accessible interactions with humans.
Akio Yamamoto
Professor
Ambient Mechatronics Laboratory
Division of Environmental Studies
https://www.aml.t.u-tokyo.ac.jp/index_e.html
Our lives are filled with various machinery systems; in particular, robots have become ubiquitous. I focus on mechatronics technology, such as actuators (motors), sensors, and haptics (technology of sense of touch). I would like to introduce some of my research.
Cooperative robots that work alongside humans in the same environment are becoming increasingly popular. However, because these robots can come into physical contact with humans, safety is a major concern. Therefore, the actuator of a robot plays a crucial role in ensuring collision safety. As a robot’s inertia increases due to the action of its reduction gear, the crushing impact of the robot with a regular electromagnetic motor increases. To ensure safety, the operation speed of the robot must be extremely low. This also leads to a lower work efficiency of the robot.
To enable faster and safer operations, lightweight actuators without reduction gears have recently been developed. We are researching electrostatic film actuators made of thin films for application to robots. Figure 1 shows such an actuator, which is flexible, light, and capable of generating thrust tens of times its weight without a reduction gear.
 Figure 1
Figure 1
Flexible electrostatic film actuator: The entire body stretches and contracts at a high driving voltage. Normally, it is sealed in a flexible package with an insulating oil.
Compared with a pneumatic artificial muscle, which is known as a light and powerful actuator for robots, an electrostatic film actuator responds faster, and its control is easier. Moreover, it can be directly driven by electricity. We created a robot arm and demonstrated that it provides better shock mitigation than conventional ones (Figure 2).
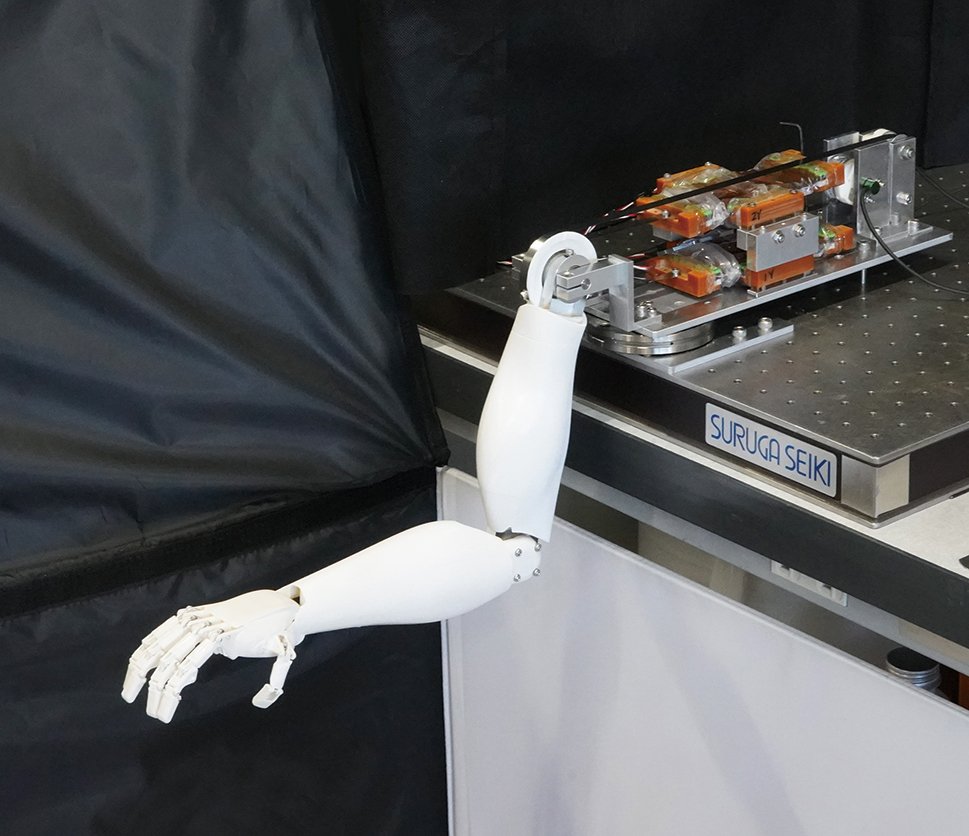 Figure 2
Figure 2
The robot arm is moved by an electrostatic film actuator.
Notably, the same type of electrostatic film actuator can also be used for entirely different purposes, such as a unique computer interface. A transparent electrostatic film actuator can be devised by combining a transparent film and a transparent electric conductor. When placed on a computer screen, the actuator can move objects on the screen according to the display’s image information (Figure 3). This can be used for amusement systems, such as games, and educational software.
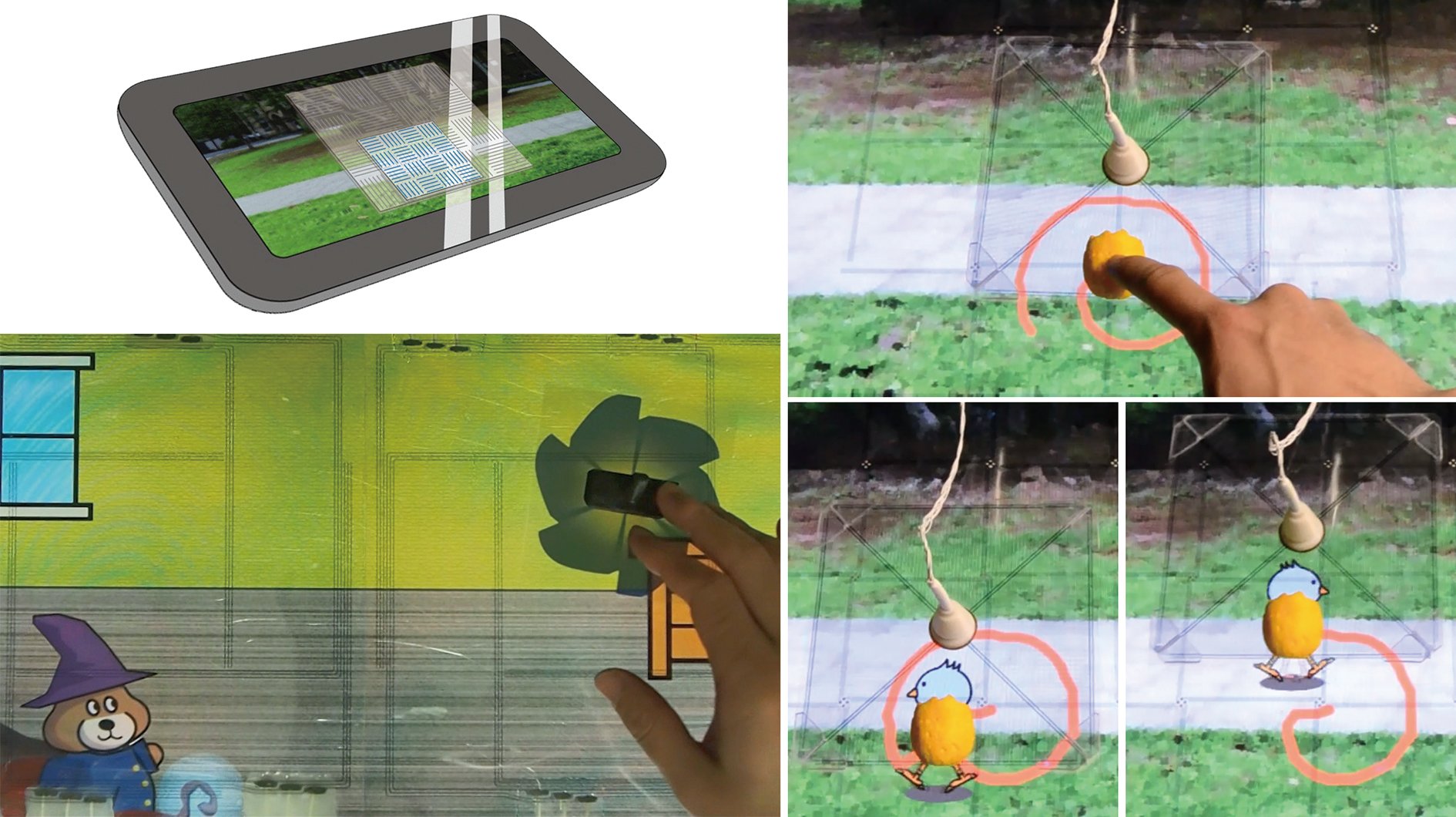 Figure 3
Figure 3
Interactions are possible by installing a transparent actuator on the display. Both the user and computer can control objects on the screen.
Moreover, I am currently researching haptic technology, which involves creating an interaction system that uses the human sense of touch. My recent focus has been on technology that can generate an illusion of pressure on the palms. Figure 4 shows an example of a device that uses this technology. The device applies pressure to the palms while the user is holding the controller, which has linear motors inside the grips, giving illusions of external forces. We are currently working on applying this technology to the controller of immersive virtual reality systems to provide a more realistic experience for users.
 Figure 4
Figure 4
The game controller gives the user an illusion of an external force that responds to the position of the tank on the screen with pressure on the palms.
vol.43
- Cover
- Energy Technology for Carbon Neutrality
- Mehr Licht!: Realizing Highly Efficient Light Energy Conversion Using Organic Materials
- Decoding Life Phenomena and Intractable Diseases Through Experimental Biology and Data Science
- For a Better Interaction Between Humans and Robots
- GSFS FRONTRUNNERS: Interview with an entrepreneur
- Voices from International Students
- ON CAMPUS x OFF CAMPUS
- EVENT & TOPICS
- INFORMATION
- Relay Essay